HOME
クムクムとは
製品
個人学習パッケージQAPRI(かぷり)
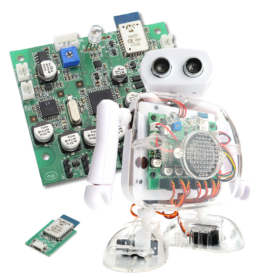
Qumcum[QX-001R3J]
QumcumPRO[QX-001R321J]
プログラミング
ツール
WEBサービス
ダウンロード
マニュアル
お問い合わせ
一般的なお問い合わせ
購入後のお問い合わせ
学習塾教室向けパッケージ資料請求
学校向けパッケージ資料請求
ショップ
学びの広場
教育機関の皆様へ
申し訳ありません
サポートページは製品ページに統合されました
Privacy Preference Center
Privacy Preferences